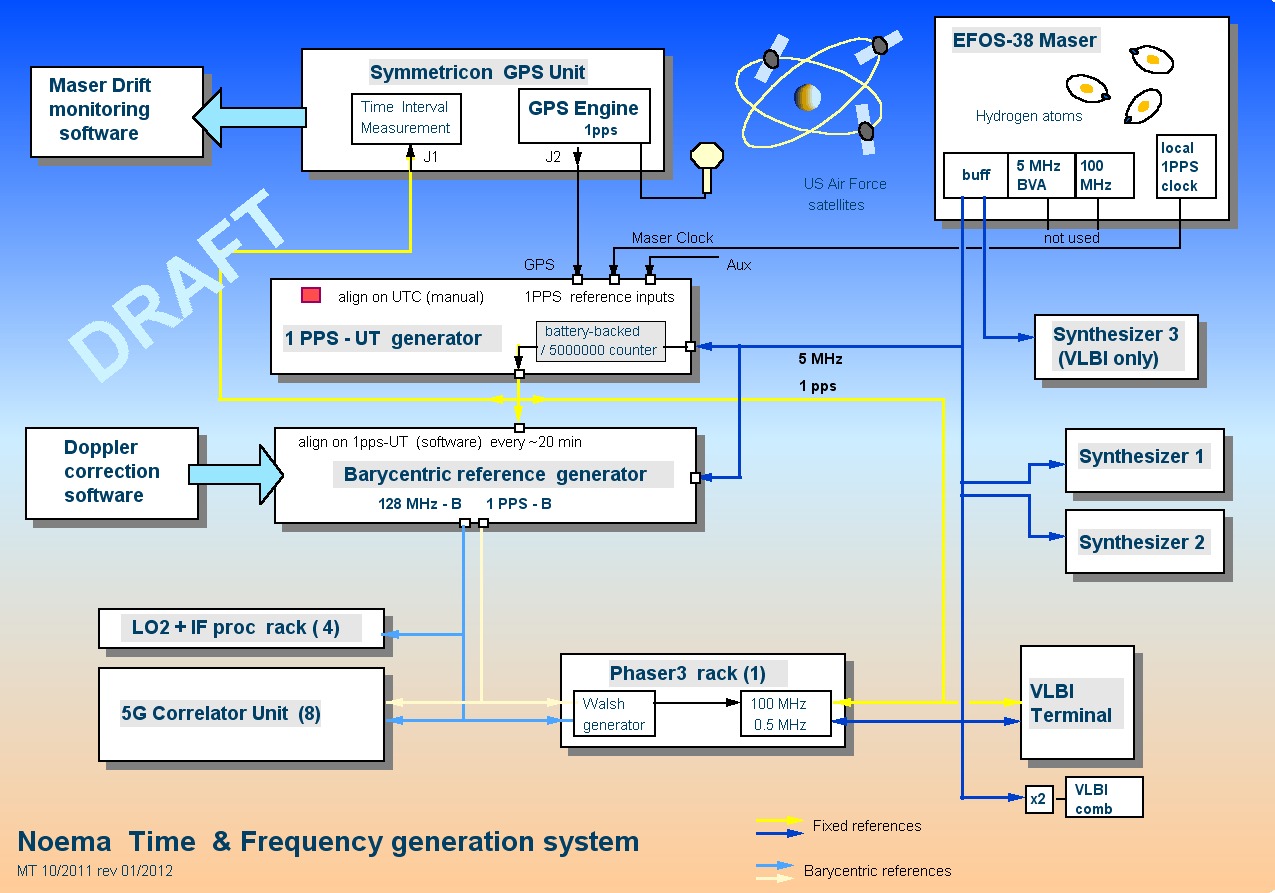
Fig.1 : Connexions of the future backends elements to implement barycentric referencing.
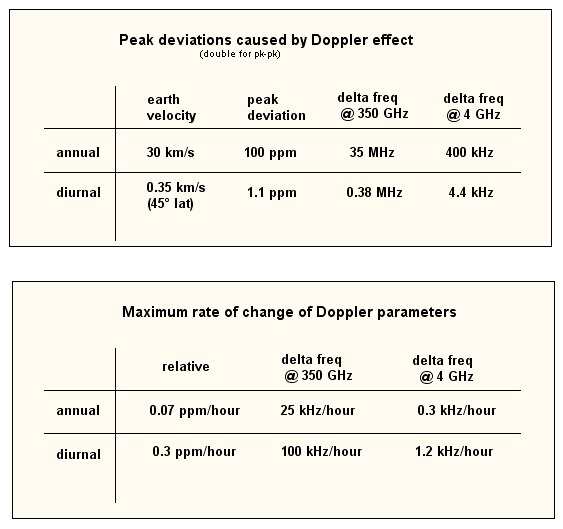
Considerations on barycentric referencing for Noema The earth motion causes an annual ~200ppm pk-pk Doppler "shift" which is traditionally corrected for by shifting the LO1. Actually Doppler effect can be considered a "shift" only when applied to a CW signal. For a wide band signal the width also is expanded or compressed in the same proportion, the difference may reach 0.8 MHz across a 4 GHz IF baseband, and this can be a few tens of spectrometer channels. For a several-month observation, it is desirable that the channels keep integrating in a fixed source-referenced frequency frame, whilst the instrument performs the appropriate on-line corrections according to the current Earth situation. Adjusting the correlator clock has the effect of expanding/compressing its channelization grid and can be used to correct for this effect in the hardware. A few years ago G.Paubert called this technique "barycentric referencing" because the Earth/Moon/Sun center of mass is to be considered. On the PdB interferometer this has some consequences : 1:On the Walsh cycle generator Since the integration time is defined in the correlator by a fixed number of clock cycles, the basic (31 msec) dump time is expected to vary by +/- 100 ppm. Preserving the orthogonality of the Walsh sequences requires that encoding and decoding are perfectly synchronous, so the LO1 Walsh generator must also derive from the same barycentric clock, and its sequence initialized by the same 1PPS. 2: On the computer transfer As a consequence, the 1-second correlator data dumps will no longer be triggered by the 1PPS events, but by a slowly drifting barycentric 1PPS-B. The time difference between the two can reach 0.1 sec after 1000 seconds. At any time, but preferably at the start of a scan, the computer should request the barycentric reference generator to align its "1PPS-B" on the UTC 1PPS in order to avoid transfer jams. 3: On the LO1 and LO2 ('s) All the LOs in the receiving chain should be locked to the barycentric reference. Offsetting the master 5 MHz would be the simplest solution. But high performance frequency synthesizers (e.g. Rohde Und Schwarz) happen to (disdainfully) reject any external reference frequency which is offset by as much as 100ppm. So an exception has to be made for the LO1. It will have to be connected to the fixed reference 5 MHz and be Doppler-corrected by software, as traditionnally. Note that the 100MHz and 0.5 MHz are part of the LO1 elaboration scheme and they are also locked to the fixed 5 MHz. 4: On the delay system The delay effectively elaborated by the digital hardware is proportional to the correlator clock period, which has been adjusted after the radial velocity of the Earth. The geometrical delay is independent of it. The difference may reach 1 nsec. A simple software scaling is necessary before sending the delay value to the hardware. |