For antenna ![]() , the antenna-based amplitude correction is given by (Eq.12.3
and 12.4).
, the antenna-based amplitude correction is given by (Eq.12.3
and 12.4).
In a baseline-based decomposition, the complex gain of baseline ![]() ,
,
![]() is
given by:
is
given by:
The antenna gain
![]() corresponds to losses due to the
antenna, mainly focus (
corresponds to losses due to the
antenna, mainly focus (![]() ) and pointing (
) and pointing (![]() ) errors coming
from thermal variations of the antenna structure and surface.
) errors coming
from thermal variations of the antenna structure and surface.
| (12.17) |
Note that an error on the focus of 0.1mm at 1.3mm will
introduce a phase error of
![]() and a loss in amplitude of
and a loss in amplitude of
![]() .
.
Details about the origin of ![]() are given in
Chapter 11. I will discuss here the practical
implementation of the atmospheric phase correction done in
real-time and in CLIC. More details are given in the IRAM report
``Practical implementation of the atmospheric phase correction for
the PdBI'' by R.Lucas.
are given in
Chapter 11. I will discuss here the practical
implementation of the atmospheric phase correction done in
real-time and in CLIC. More details are given in the IRAM report
``Practical implementation of the atmospheric phase correction for
the PdBI'' by R.Lucas.
The atmospheric phase fluctuations are due to different time
varying water vapor content in the line-of-sight of each antenna
through the atmosphere. Between antennas ![]() and
and ![]() , this
introduces a decorrelation factor
, this
introduces a decorrelation factor
![]() on the visibility
on the visibility ![]() . This term, non-linear,
cannot be factorized by antenna. Moreover due to the physical
properties of the atmosphere, there are several timescales. One
can correct partially some, but not all, of them.
. This term, non-linear,
cannot be factorized by antenna. Moreover due to the physical
properties of the atmosphere, there are several timescales. One
can correct partially some, but not all, of them.
At Bure the basic integration time is 1 second and the scan
duration is usually 60 seconds. The radiometric correction works
then on timescales of a few seconds to one minute. It corrects
only the amplitude: the phase is never changed because phase jumps
between individual scans are dominated by instrumental limitations
(mainly the receiver stability on a few minutes + ground pickup
variations). The implications on the image quality are developed
in Chapter 18. Longer atmospheric timescales of
about ![]() hours are removed by the spline functions fitted
inside the phase and the amplitude.
hours are removed by the spline functions fitted
inside the phase and the amplitude.
Intermediate timescales fluctuations from about one minute (the
scan duration) to 1 hour are not removed. The resulting rms phase
are measured by the fit of the splines in the phase. These
timescales are not suppressed by the radiometric correction, and
they contribute to the decorrelation factor ![]() (see
Eq.12.16), as the main component.
(see
Eq.12.16), as the main component.
The decomposition of the atmospheric timescales for the PdBI observing method is given in table 12.3.
The differences in water vapor content are measurable by
monitoring the variations of the sky emissivity ![]() . A
monitoring of the total power in front of each antenna will then
lead to a monitoring of the phase fluctuations. At Bure, we
monitor the total power
. A
monitoring of the total power in front of each antenna will then
lead to a monitoring of the phase fluctuations. At Bure, we
monitor the total power ![]() with the 1.3mm receivers. The
variation of
with the 1.3mm receivers. The
variation of ![]() ,
,
![]() (equal to
(equal to
![]() ) is linked to the total power by
) is linked to the total power by
With standard atmospheric conditions and following [Thompson et al. 1986] (their Eq.13.20), the variation of the path length through the atmosphere at zenith can be approximated by:
To reduce the phase fluctuation to a reasonable value having a negligible impact on
the image quality e.g.
![]() , one needs to get
, one needs to get
![]() K corresponding to a global path length variation of
K corresponding to a global path length variation of
![]() . For a typical
. For a typical
![]() K (DSB in the antenna plane, not SSB
outside the atmosphere as for astronomical use), the instrumental stability required
(
K (DSB in the antenna plane, not SSB
outside the atmosphere as for astronomical use), the instrumental stability required
(
![]() ) must then be of order of
) must then be of order of
![]() .
.
At Bure, on timescales of a few minutes,
![]() is
dominated by the stability of the receivers which must be
carefully tuned to get the best stability. The 1.3mm receivers
are systematically tuned to get a stability of a few
is
dominated by the stability of the receivers which must be
carefully tuned to get the best stability. The 1.3mm receivers
are systematically tuned to get a stability of a few ![]() ;
the stability is checked by doing autocorrelations of 60 seconds
on the hot load. Achieving the required stability may prove
impossible at some frequencies.
;
the stability is checked by doing autocorrelations of 60 seconds
on the hot load. Achieving the required stability may prove
impossible at some frequencies.
Ideally one would like to use ![]() measured each second on each antenna to
compute
measured each second on each antenna to
compute ![]() and correct the measured baseline phases. Practically, it is not
so simple because
and correct the measured baseline phases. Practically, it is not
so simple because ![]() can do many turns and instrumental effects affect the
measured
can do many turns and instrumental effects affect the
measured ![]() .
.
Instead we use a differential procedure: once the antenna tracks a given source, one
calibrates the atmosphere to calculate
![]() ,
,
![]() and
and
![]() . Phase corrections are then referenced to
. Phase corrections are then referenced to ![]() .
.
For the quasi-real time correction,
The CLIC command ``MONITOR
![]() '' allows to
re-compute all the parameters. This command is useful when you
want to select a better value for
'' allows to
re-compute all the parameters. This command is useful when you
want to select a better value for
![]() .
.
 |
In the real-time processing, only the receiver gain and bandpass, the atmospheric transmission and the radiometric correction have been calibrated.
Fitting of the temporal variations of the global antenna gain (the so-called amplitude calibration) is performed in CLIC by fitting splines functions with
time steps of 3-6 hours (SOLVE AMPLITUDE [/WEIGHT] [/POL ![]() ] [/BREAK
] [/BREAK
![]() ]) and can be done either in baseline-based or in antenna-based mode. Note
that in the latter case, the averaged amplitude closures are computed, as well as
their standard deviations. The amplitude closures should be close to 100%. Strong
deviations of amplitude closures from 100% are an indication of amplitude loss
on long baselines, due to phase decorrelation during the time averaging. The fit
then shows systematic errors; if this occurs, baseline based calibration of the
amplitudes might be preferred.
]) and can be done either in baseline-based or in antenna-based mode. Note
that in the latter case, the averaged amplitude closures are computed, as well as
their standard deviations. The amplitude closures should be close to 100%. Strong
deviations of amplitude closures from 100% are an indication of amplitude loss
on long baselines, due to phase decorrelation during the time averaging. The fit
then shows systematic errors; if this occurs, baseline based calibration of the
amplitudes might be preferred.
The amplitude calibration involves interpolating the time variations of the antenna gains measured with the amplitude calibrator, assuming the its flux is known. The fitted splines must be as smoothed as possible in order to minimize the errors introduced on the source which is observed in between calibrators.
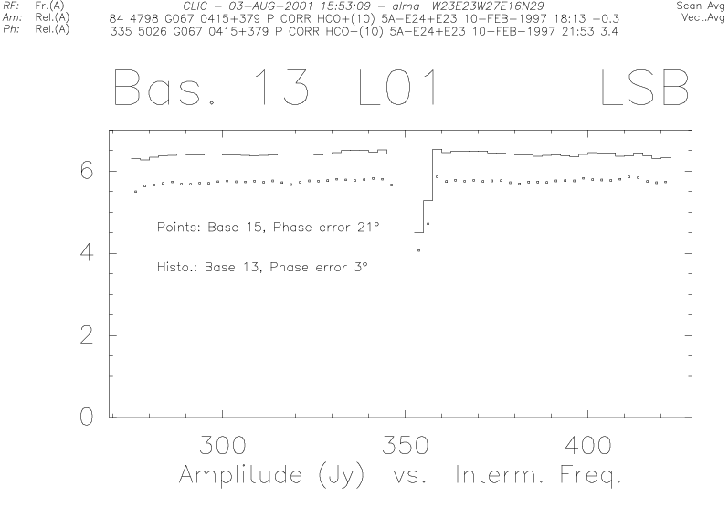
Once the amplitude calibration curve is stored, one can perform
some simple checks on the calibrated data of the calibrator. These
checks must be done in ![]() (mode ``AMPLITUDE ABSOLUTE
RELATIVE'' to the flux density of the calibrator).
(mode ``AMPLITUDE ABSOLUTE
RELATIVE'' to the flux density of the calibrator).
 |
 |